Torna alle news
La robotica OMRON a INTERPACK 2026

Scopri dal vivo l’automazione flessibile della movimentazione dei carrelli
In molti stabilimenti di confezionamento e lavorazione, la movimentazione dei carrelli viene ancora gestita manualmente. Quando gli operatori dedicano tempo a spostare carrelli tra linee, postazioni di lavoro e processi di fine linea, la produzione può rallentare, possono crearsi colli di bottiglia e si riduce il tempo disponibile per attività a maggior valore.
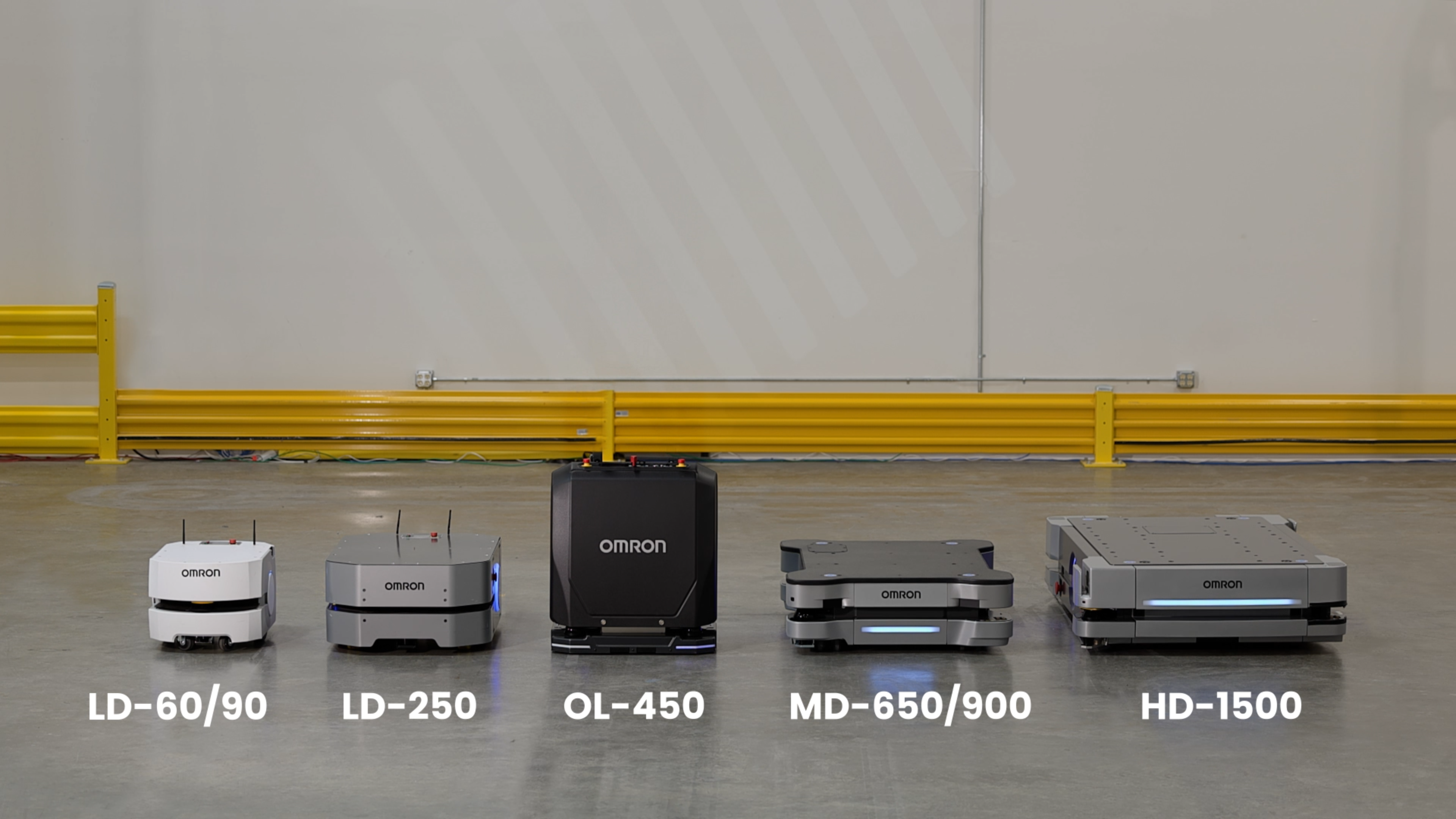
A Interpack 2026, OMRON presenterà l’OL-450S, la sua prima soluzione chiavi in mano con robot mobili autonomi per la movimentazione automatizzata dei carrelli. OL-450S sposta i carrelli tra linee, postazioni di lavoro, aree di preparazione e processi di fine linea, contribuendo a ridurre la movimentazione manuale e a mantenere fluido il flusso dei materiali nello stabilimento — senza sostituire i carrelli esistenti né richiedere importanti modifiche al layout produttivo.
Grazie al design ribassato, il robot può muoversi sotto i carrelli e operare in spazi dove corsie strette, limiti di altezza e ostacoli a livello del pavimento possono mettere in difficoltà altre soluzioni di automazione mobile. La dimostrazione includerà anche l’integrazione con un lettore di codici QR VHV5, mostrando come il trasporto automatizzato possa essere combinato con tecnologie di identificazione per migliorare tracciamento, coordinamento e tracciabilità lungo la produzione.









Cosa scoprirete allo stand
- Come automatizzare la movimentazione dei carrelli senza riprogettare lo stabilimento
- Come ridurre gli spostamenti manuali e liberare gli operatori per attività a maggior valore
- Perché i robot mobili autonomi ribassati sono efficaci in corsie strette e aree con altezza limitata
- Come le opzioni configurabili del montante supportano una navigazione affidabile in ambienti reali
- Come la lettura dei codici QR può migliorare tracciamento, coordinamento e tracciabilità
Dettagli dell’evento
7–13 maggio
2026
Numero stand
D72-11
Messe Düsseldorf
Germania
Processing &
Packaging
Incontra il nostro team

Miguel Garces
Marketing prodotto Robotica
Miguel è responsabile della commercializzazione prodotti per la robotica e contribuisce a definire messaggi e strategie di mercato per il portafoglio robotica. Collabora con team di diverse funzioni per supportare lanci di prodotto, comunicazioni ai clienti e iniziative regionali. Il suo obiettivo è rendere le soluzioni di automazione complesse chiare, rilevanti e concretamente utilizzabili dai clienti.

Gerd Sieberz
Clienti Robotica
Gerd è responsabile clienti per la robotica e vanta 13 anni di esperienza nel supporto ai clienti nel campo dell’automazione. Aiuta i team a individuare opportunità per la robotica, ad allineare le soluzioni agli obiettivi produttivi e a pianificare il successo nel lungo periodo. Il suo obiettivo è aiutare i produttori a migliorare efficienza, flessibilità e prestazioni complessive con un’automazione pratica.

Marco Zangrandi
Marketing prodotto Robotica mobile
Marco è responsabile della commercializzazione prodotti per i robot mobili nella regione EMEA. Guida la strategia di lancio sul mercato e supporta il ciclo di vita di hardware e software per robot mobili autonomi, dal posizionamento e lancio fino all’adozione e ottimizzazione. Il suo obiettivo è aiutare i clienti ad applicare la robotica mobile in modo efficace in ambienti reali.

Daniel Bühler
Clienti Robotica
Daniel è responsabile clienti per la robotica e aiuta i clienti a individuare dove la robotica può generare il maggiore impatto nelle loro attività. Lavora a stretto contatto con i team per comprenderne gli obiettivi, identificare opportunità pratiche di automazione e collegarle alle soluzioni più adatte. Il suo obiettivo è aiutare i produttori a migliorare flessibilità, produttività e fiducia nei propri piani di automazione.

Alexander de Witt
Applicazioni Robotica
Alexander è ingegnere applicativo per la robotica e collabora con i clienti per sviluppare soluzioni di automazione affidabili e adatte alle esigenze applicative. Supporta la pianificazione delle applicazioni, le valutazioni tecniche e l’allineamento della soluzione, aiutando i team a passare dal concetto all’implementazione con sicurezza. Il suo obiettivo è offrire una consulenza robotica pratica a supporto di installazioni efficienti e risultati duraturi.

Max Brehmer
Applicazioni Robotica
Max è ingegnere applicativo per la robotica e supporta i clienti negli aspetti tecnici delle applicazioni robotiche. Aiuta i team a valutare la fattibilità, analizzare i requisiti applicativi e comprendere cosa serve per implementare con successo la robotica in produzione. Il suo obiettivo è trasformare idee di automazione in soluzioni pratiche e affidabili.
AUTONOMOUS MOBILE ROBOTS
Un modo più intelligente per movimentare i carrelli
Scoprite come OL-450S rende la movimentazione dei carrelli più costante, sicura ed efficiente grazie a percorsi ripetibili, sicurezza integrata e logiche operative pensate per l’uso quotidiano. Aiuta a ridurre gli spostamenti manuali, migliorare il flusso dei materiali e mantenere fluide le operazioni in reparto.
Torna alle news
Resta connesso

Approfondimenti correlati
Vedi tutti gli approfondimenti


