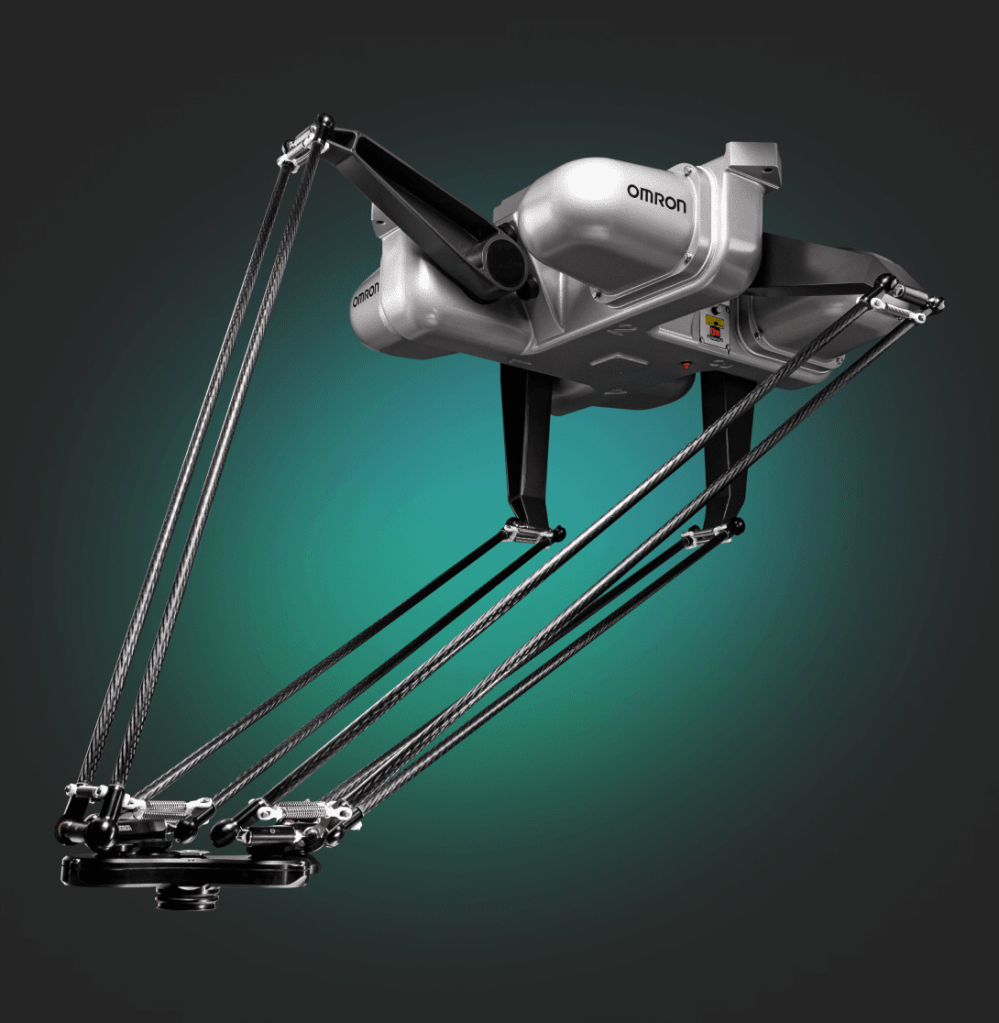
iX4 & Quattro
iX4-650
|
最大工作直径 |
1300 mm |
|
最大负载 |
15 kg |
|
循环时间(2 kg 负载下) |
0.30-0.61 s |
|
环境防护 |
IP65/66/67,符合 USDA 标准 |
|
连接性 |
通过欧姆龙 NJ501-R 实现 EtherCAT® 连接 |
|
编程环境 |
Sysmac Studio |
iX4-800
|
最大工作直径 |
1600 mm |
|
最大负载 |
10 kg |
|
循环时间(2 kg 负载下) |
0.40-0.55 s |
|
环境防护 |
IP65/66/67,符合 USDA 标准 |
|
连接性 |
通过欧姆龙 NJ501-R 实现 EtherCAT® 连接 |
|
编程环境 |
Sysmac Studio |
Quattro-650
|
最大工作直径 |
1300 mm |
|
最大负载 |
15 kg |
|
循环时间(2 kg 负载下) |
0.37-0.59 s |
|
环境防护 |
IP65/66/67,符合 USDA 标准 |
|
连接性 |
以太网 |
|
编程环境 |
ACE 软件,ePLC |
Quattro-800
|
最大工作直径 |
1600 mm |
|
最大负载 |
10 kg |
|
循环时间(2 kg 负载下) |
0.33-0.62 s |
|
环境防护 |
IP65/66/67,符合 USDA 标准 |
|
连接性 |
以太网 |
|
编程环境 |
ACE 软件,ePLC |
图库
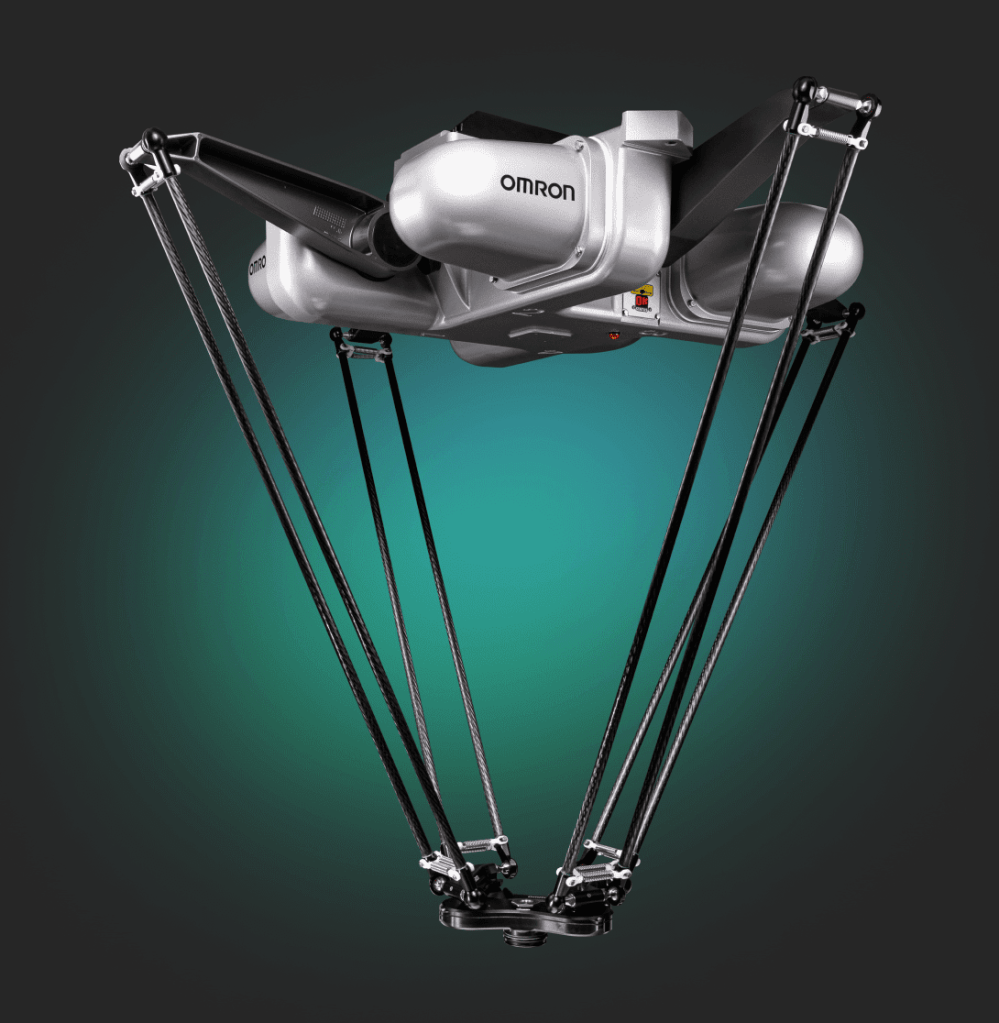

特性
卓越的速度与精度,助力高性能抓取

高负载能力
负载最高可达 15 kg,提供多种平台类型,并具备精确的多点抓取功能——非常适合快速装配和物料搬运。

快速且精确的循环
循环时间低至 0.33 秒(2 kg 负载下),确保在分拣、食品分类和装配中实现最高生产率。

灵活的工作半径选择
1300 mm 或 1600 mm 的工作半径可适应狭窄空间或大型工作区域,满足仓库自动化的需求。

无缝连接
iX4 通过欧姆龙 NJ501-R 支持 EtherCAT,而 Quattro 提供带有 ACE 或 ePLC 选项的以太网连接,实现灵活集成。

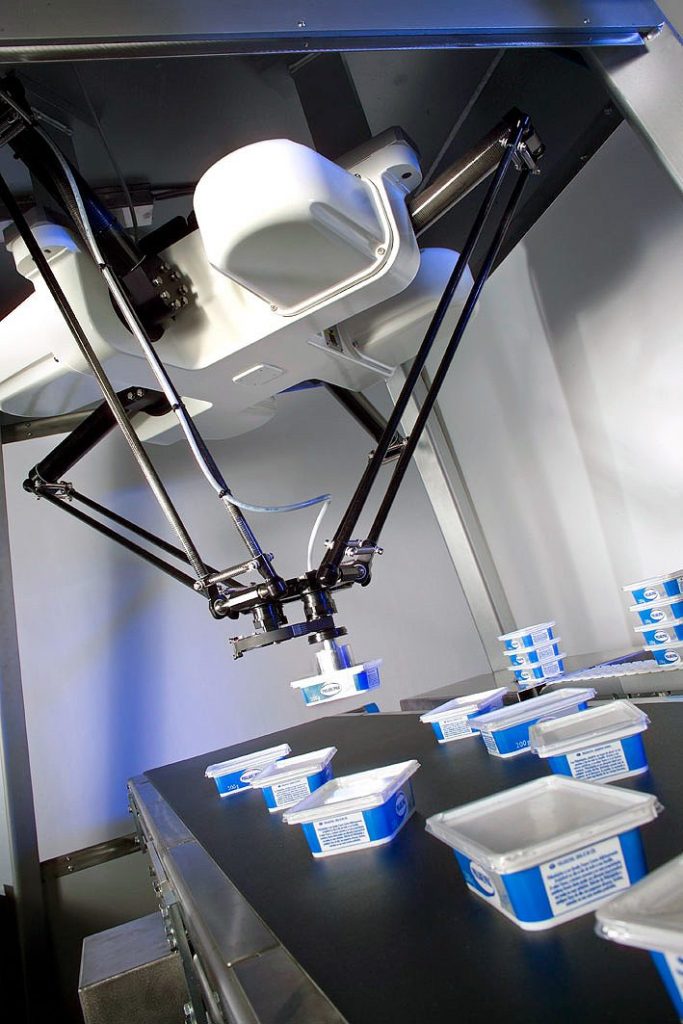
食品安全合规
两款型号均为食品级,符合 USDA 污染预防标准,适用于初级食品加工。

环境适应性
提供 IP65/66 和 IP67 等级,适用于冲洗环境、多尘的制造车间和洁净室操作。






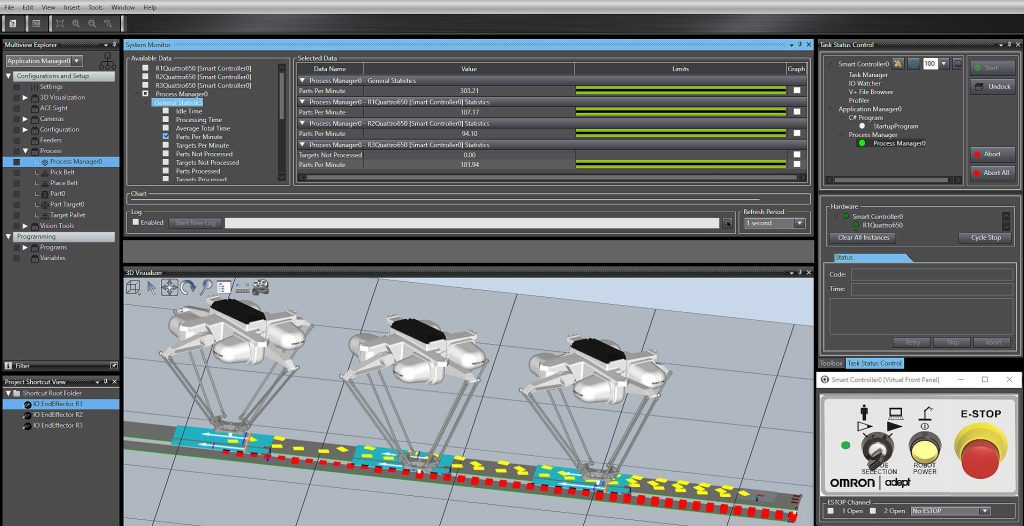
机器人控制器
无缝控制与卓越性能
利用强大的机器人集成控制器实现更快的操作、更长的运行时间以及无与伦比的精度。将 iX4 和 Quattro 机器人与自动化系统无缝结合,简化工作流程并最大化生产率。
探索解决方案
实现您的应用自动化
利用欧姆龙的工业自动化解决方案最大化生产率——在一个平台上轻松编程并同步机器人、视觉和安全系统。集成仿真功能简化了部署和故障排除,确保操作顺畅。


运动控制
伺服系统可最大限度地减少停机时间和维护,而工业 PC 则可确保自动化过程中精确、可靠的流程控制。
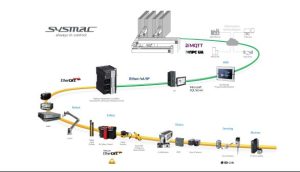
机器人
使用机器人集成控制器对机器人进行编程和集成,统一自动化和运动控制以实现巅峰性能。

控制
通过机器人集成控制器将机器人技术与自动化统一,实现灵活扩展和精确控制。

视觉
欧姆龙的 IPC 应用控制器支持 8 个摄像头,可实现高速、精确的图像处理。

安全
安全传感器确保人机协作,而远程 I/O 则凭借可靠的实时性能减少停机时间和成本。

服务
全面的全球服务
利用我们的全球网络获取专家培训、安全服务和支持,确保最长的运行时间和巅峰的机器人性能。
了解更多