产品
工业
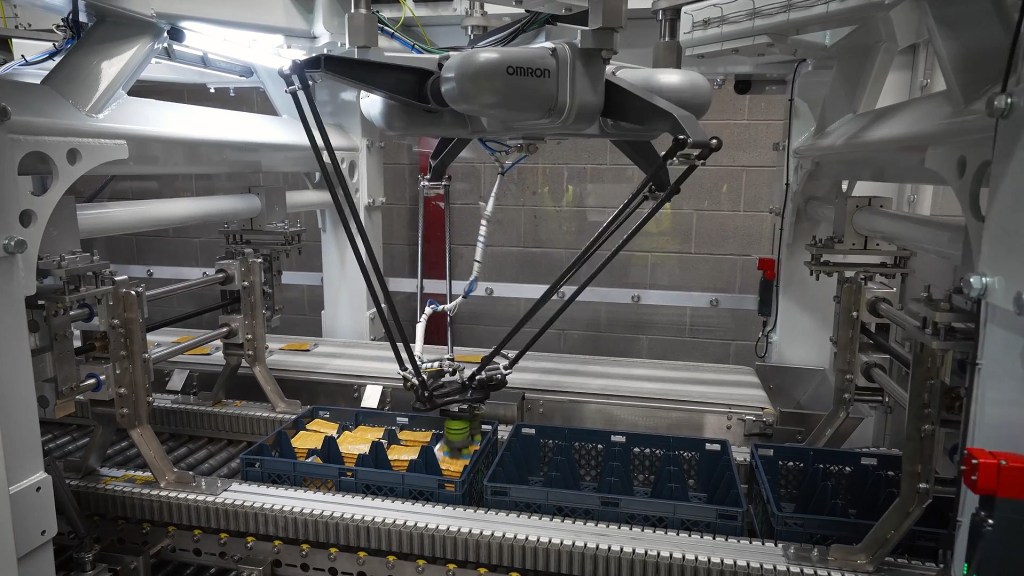
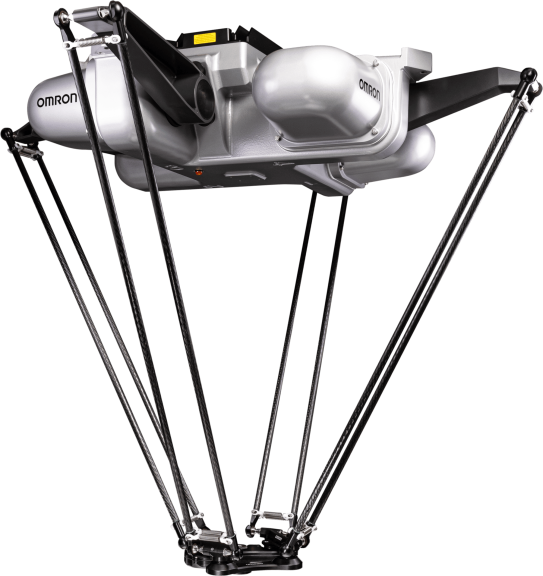
并联机器人
利用并联机器人实现高速、精确的拾取和放置——最大限度地提高吞吐量和可靠性。

型号

01
iX3
iX3 并联机器人擅长高速拾取和放置作业,可处理高达 8 kg 的负载,追踪速度为 1.4 m/s,工作半径为 1130 mm。其多点拾取能力和减少的振动确保了高效、稳定且极具成本效益的性能。
最大工作直径 |
1130 mm |
最大负载 |
8 kg |
循环时间(2 kg 时) |
0.32 s |
查看产品详情

02
Hornet
Hornet 机器人可处理 8 kg 负载的高速拾取和放置作业,追踪速度为 1.4 m/s,工作半径为 1130 mm。其多点拾取支持和减少的振动确保了在苛刻任务中的高效、优化性能。
最大工作直径 |
1130 mm |
最大负载 |
8 kg |
循环时间(2 kg 时) |
0.32 s |
查看产品详情
03
iX4
iX4 机器人采用专利的 4 臂设计,能够以卓越的速度和精度处理高达 15 kg 的负载。其符合 USDA 标准的性能确保了在食品加工和制药包装等高需求、卫生应用中的可靠性和效率。
最大工作直径 |
1300 mm 和 1600 mm |
最大负载 |
15 kg |
循环时间(2 kg 时) |
0.30-0.42 s |
查看产品详情

04
Quattro
Quattro 机器人采用专利的 4 臂设计,可处理高达 15 kg 的负载,具有高速、精确的多点拾取和符合 USDA 标准的性能,确保了在高需求、卫生应用中的可靠性和效率。
最大工作直径 |
1300 mm 和 1600 mm |
最大负载 |
15 kg |
循环时间(2 kg 时) |
0.30-0.42 s |
查看产品详情
对比
产品
1130 mm
8 kg(3 轴) 3 kg(4 轴)
0.32-0.42 s
3 轴 4 轴
IP20 IP65 IP67
欧姆龙 NJ501-R (通过 EtherCAT®)
倒置
Sysmac Studio
通过欧姆龙 NJ501-R 的 EtherCAT®
1130 mm
8 kg(3 轴) 3 kg(4 轴)
0.32-0.42 s
3 轴 4 轴
IP20 IP65 IP67
SmartController EX NJ/NX/NY 系列
倒置
ACE 软件 ePLC
EtherCAT® Ethernet
1300 mm (iX4-650) 1600 mm (iX4-800)
15 kg (iX4-650) 10 kg (iX4-800)
0.30–0.61 s (iX4-650) 0.33–0.62 s (iX4-800)
4
IP20 IP65 IP67
欧姆龙 NJ501-R (通过 EtherCAT®)
倒置
Sysmac Studio
通过欧姆龙 NJ501-R 的 EtherCAT®
1300 mm (Quattro 650) 1600 mm (Quattro 800)
15 kg (Quattro 650) 10 kg (Quattro 800)
0.30–0.61 s (Quattro 650) 0.33–0.62 s (Quattro 800)
4
IP65 650HS 为 IP66
SmartController EX NJ/NX/NY 系列
倒置
ACE 软件 ePLC
Ethernet
最大工作直径
最大负载
循环时间(2 kg 负载时)
轴数
防护等级选项
机器人控制器选项
安装选项
编程环境
连接性
|
|
||||
|---|---|---|---|---|
|
最大工作直径 |
1130 mm |
1130 mm |
1300 mm (iX4-650) 1600 mm (iX4-800) |
1300 mm (Quattro 650) 1600 mm (Quattro 800) |
|
最大负载 |
8 kg(3 轴) 3 kg(4 轴) |
8 kg(3 轴) 3 kg(4 轴) |
15 kg (iX4-650) 10 kg (iX4-800) |
15 kg (Quattro 650) 10 kg (Quattro 800) |
|
循环时间(2 kg 负载时) |
0.32-0.42 s |
0.32-0.42 s |
0.30–0.61 s (iX4-650) 0.33–0.62 s (iX4-800) |
0.30–0.61 s (Quattro 650) 0.33–0.62 s (Quattro 800) |
|
轴数 |
3 轴 4 轴 |
3 轴 4 轴 |
4 |
4 |
|
防护等级选项 |
IP20 IP65 IP67 |
IP20 IP65 IP67 |
IP20 IP65 IP67 |
IP65 650HS 为 IP66 |
|
机器人控制器选项 |
欧姆龙 NJ501-R (通过 EtherCAT®) |
SmartController EX NJ/NX/NY 系列 |
欧姆龙 NJ501-R (通过 EtherCAT®) |
SmartController EX NJ/NX/NY 系列 |
|
安装选项 |
倒置 |
倒置 |
倒置 |
倒置 |
|
编程环境 |
Sysmac Studio |
ACE 软件 ePLC |
Sysmac Studio |
ACE 软件 ePLC |
|
连接性 |
通过欧姆龙 NJ501-R 的 EtherCAT® |
EtherCAT® Ethernet |
通过欧姆龙 NJ501-R 的 EtherCAT® |
Ethernet |





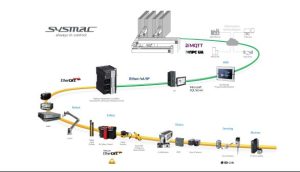
端到端自动化
利用欧姆龙的完整自动化平台提高生产力。在一个系统上管理机器人、视觉、运动和安全——并在仿真中进行端到端验证,以实现更快、更可靠的部署。


01
运动控制
伺服系统可减少停机时间和维护,而工业 PC 则可确保自动化过程中精确、可靠的过程控制。
02
机器人
使用 Sysmac Studio 轻松为工业机器人编程。SmartController EX 确保无缝集成和高性能。

03
控制
紧凑的控制单元可节省空间并提高生产力。PLC 为高效的自动化系统提供完整的过程控制。

04
视觉
欧姆龙相机和传感器使机器人能够与其环境无缝交互,确保精确度和准确性。

05
安全
安全传感器确保人机和谐,而远程 I/O 则通过可靠的网络性能降低成本和停机时间。

服务
全球支持与服务网络
欧姆龙机器人提供全球支持、培训和安全服务,确保您的并联机器人以最高效率运行,从而最大限度地延长正常运行时间并实现最佳性能。
了解更多