Back to case studies
通过高速圆周跟踪实现生产线末端自动理瓶

医疗

包装

i4H SCARA 机器人
紧凑型机器人工作站取代医疗诊断包装中的人工理瓶
在医疗诊断包装中,生产线末端的理瓶通常仍由人工处理,或使用难以调整的传统机械系统。对于 Samas Italy 而言,这造成了明显的瓶颈:重复的人工劳动、规格切换灵活性有限,以及在进入枕式包装机和装盒机前的最后阶段连续性不足。其目标是在不增加复杂性或占用大量空间的情况下,实现该生产线环节的自动化。
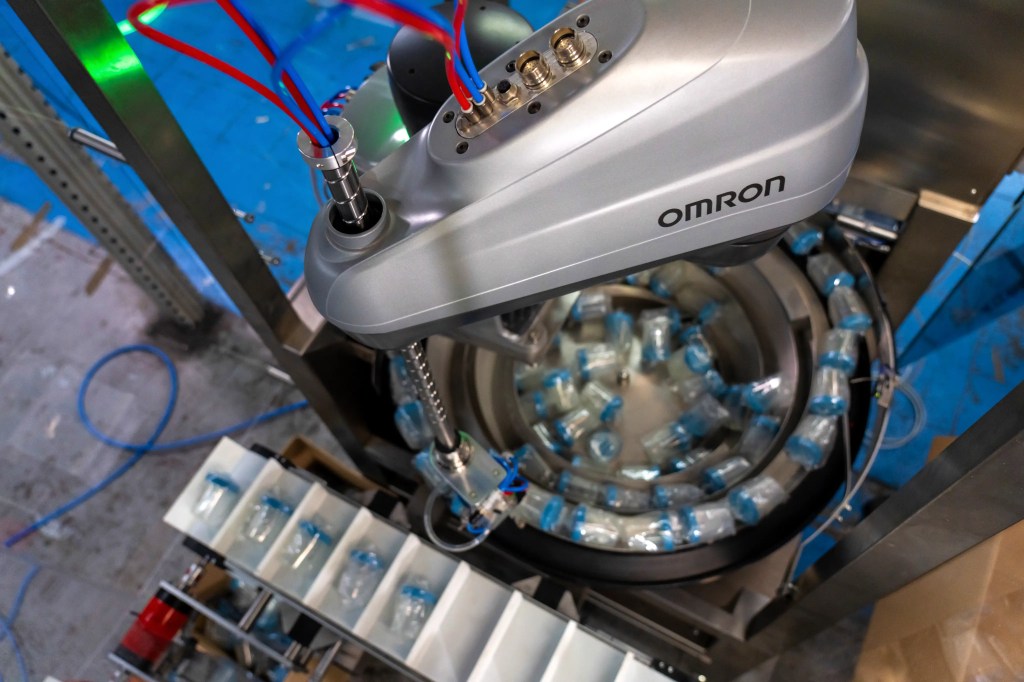
为解决这一问题,Samas 与欧姆龙合作开发了一个紧凑型圆周跟踪工作站,集成了 i4H SCARA 机器人、FHV7 视觉系统、1S 伺服驱动器与电机,以及 Sysmac 架构下的 NJ 系列控制器。通过使用 欧姆龙机器人包装库 (ORPL),机器人可以识别旋转环上的瓶子,在运动中进行跟踪,并以单个连续动作将其放置到同步的直线输送机上。这打造了一个紧凑的机器人生产线末端包装解决方案,具有精确的运动控制、更低的机械复杂性,并主要通过数字化方式进行规格切换。
结果是理瓶过程变得更快速、更灵活,产能达到每分钟 50–60 件,在某些配置下最高可达每分钟 80 件。生产线末端的重复性人工操作大幅减少,工艺可靠性得到提升,且只需极少的机械调整即可快速完成换产。对于 Samas 而言,该项目填补了关键的自动化空白,同时为需要可靠、多品种包装的受监管行业创建了一个可扩展的解决方案。
观看 Samas 解决方案的实际运行情况:
“超出了我们的初步预期,我们成功进一步提升了机器速度。最重要的是,我们真正实现了从头到尾的整线自动化,消除了关键的人工瓶颈。” —— Samas 首席执行官 Marco Alfani











结果概览:
- 自动理瓶产能最高可达每分钟 80 件
- 标准操作配置下每分钟 50–60 件
- 大幅减少生产线末端的重复性人工操作
- 以数字化为主的快速规格切换,机械干预极少
- 紧凑的占地面积,适用于空间受限的生产环境
- 提高工艺可靠性并减少浪费
- 通过降低人工和运营成本实现快速投资回报 (ROI)
适用于受监管包装线的更智能理瓶方案
该应用展示了如何通过生产线末端理瓶自动化来减少人工、提高产能并简化换产,且不增加不必要的复杂性。在处理多种瓶子规格的生产线中,它有助于消除长期存在的瓶颈,并改善向装盒、枕式包装及其他下游包装工艺的转移。
通过将紧凑的占地面积与灵活的操作相结合,该解决方案可帮助制造商提高生产线连续性,更好地利用车间空间,并构建更高效的包装流程。请与我们的团队联系,讨论您的应用需求,并探索定制化自动化解决方案如何提高产能、减少人工处理并支持更灵活的包装作业。
Back to case studies
预约咨询

相关见解
查看所有见解