


产品
协作型
欧姆龙 TM 系列
欧姆龙的协作机器人可提高安全性并增强人机协作。

型号

01
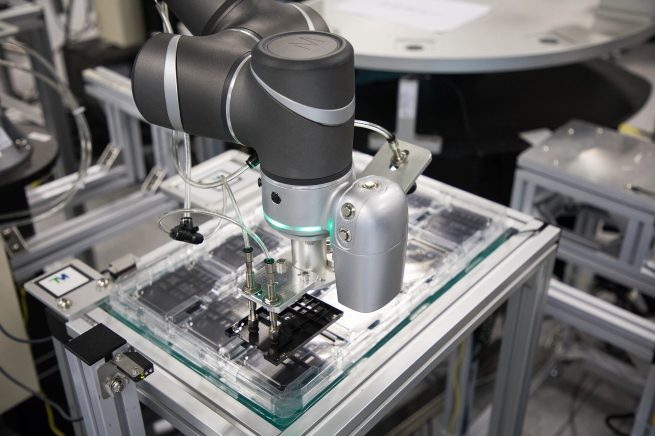
欧姆龙 TM5-700
紧凑型协作机器人,负载 6 kg,工作半径 700 mm,内置视觉,适用于精密任务。可安装在墙壁、桌面或天花板上。符合 IP54 防护等级和 ISO Class 3 认证,是装配和检测的理想选择。可无缝集成到协作工作流中。
最大负载 |
6 kg |
最大工作半径 |
700 mm |
重复精度 |
±0.05 mm |
查看产品详情
02
欧姆龙 TM5-900
轻型协作机器人,负载 4 kg,工作半径 900 mm,内置视觉,确保精准。紧凑设计,可安装在墙壁、桌面或天花板上。符合 IP54 防护等级和 ISO Class 3 认证,非常适合物流、检测和多种应用场景。
最大负载 |
4 kg |
最大工作半径 |
900 mm |
重复精度 |
±0.05 mm |
查看产品详情
03
欧姆龙 TM12
重载协作机器人,负载 12 kg,工作半径 1300 mm,适用于装配和物料搬运任务。它具有内置视觉以实现精准操作,并配备先进的安全功能以增强协作性能,确保可靠性和效率。
最大负载 |
12 kg |
最大工作半径 |
1300 mm |
重复精度 |
±0.1 mm |
查看产品详情

04
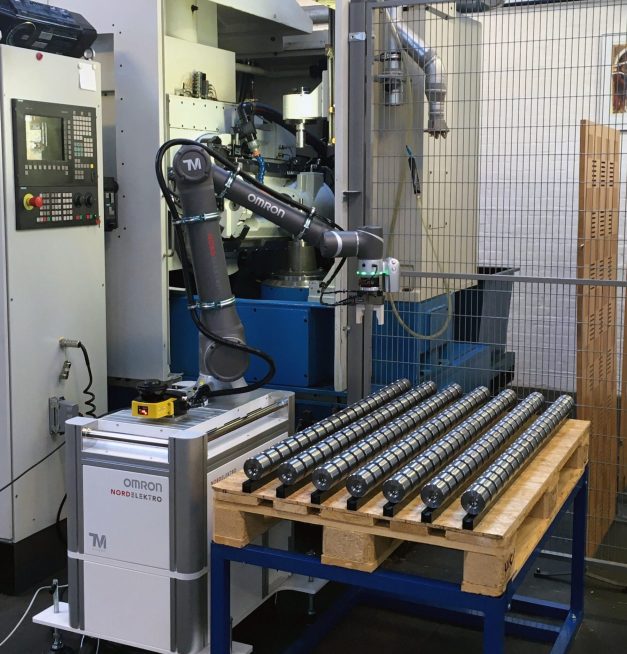
欧姆龙 TM14
强力协作机器人,负载 14 kg,工作半径 1100 mm,内置视觉,专为码垛、机床管理和重载任务中的精度而设计。符合 IP54 防护等级和 ISO Class 3 认证,在严苛的工作流中表现可靠。
最大负载 |
14 kg |
最大工作半径 |
1100 mm |
重复精度 |
±0.1 mm |
查看产品详情
05
欧姆龙 TM16
高负载协作机器人,负载 16 kg,工作半径 900 mm,内置视觉,实现精准搬运。TM16 非常适合装配、物流和重型任务,将精准搬运与 IP54 级耐用性和 ISO Class 3 认证相结合。
最大负载 |
16 kg |
最大工作半径 |
900 mm |
重复精度 |
±0.1 mm |
查看产品详情

06
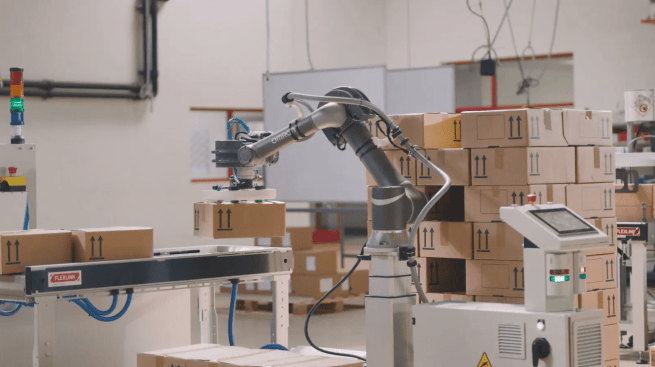
欧姆龙 TM20
TM 系列中功能最强大的协作机器人,负载 20 kg,工作半径 1300 mm。专为码垛和物料搬运等重型任务打造,具有 IP54 防护等级和 ISO Class 3 认证,提供可靠性能。
最大负载 |
20 kg |
最大工作半径 |
1300 mm |
重复精度 |
±0.1 mm |
查看产品详情
TM 系列对比
产品
6 kg
700 mm
±0.05 mm
1.1 m/s
关节 1, 2, 3: 180°/s 关节 4, 5, 6: 225°/s
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±155° 关节 6: ±270°
墙壁 桌面 天花板
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3
TMFlow (基于流程图)
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选)
4 kg
900 mm
±0.05 mm
1.4 m/s
关节 1, 2, 3: 180°/s 关节 4, 5, 6: 225°/s
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±155° 关节 6: ±270°
墙壁 桌面 天花板
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3
TMFlow (基于流程图)
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选)
12 kg
1300 mm
±0.1 mm
1.3 m/s
关节 1, 2: 120°/s 关节 3: 180°/s 关节 4, 5: 180°/s 关节 6: 180°/s
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±166° 关节 6: ±270°
墙壁 桌面 天花板
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3
TMFlow (基于流程图)
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选)
14 kg
1100 mm
±0.1 mm
1.1 m/s
关节 1, 2: 120°/s 关节 3: 180°/s 关节 4, 5: 150°/s 关节 6: 180°/s
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±163° 关节 6: ±270°
墙壁 桌面 天花板
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3
TMFlow (基于流程图)
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选)
16 kg
900 mm
±0.1 mm
1.1 m/s
关节 1, 2: 120°/s 关节 3, 4, 5, 6: 180°/s
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±155° 关节 6: ±270°
墙壁 桌面 天花板
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3
TMFlow (基于流程图)
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选)
20 kg
1300 mm
±0.1 mm
1.3 m/s
关节 1, 2: 90°/s 关节 3: 120°/s 关节 4: 150°/s 关节 5: 180°/s 关节 6: 225°/s
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±166° 关节 6: ±270°
墙壁 桌面 天花板
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3
TMFlow (基于流程图)
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选)
最大负载
最大工作半径
重复精度
平均速度
关节速度
关节范围
安装选项
IP 和洁净室等级
编程环境
通信
|
|
||||||
|---|---|---|---|---|---|---|
|
最大负载 |
6 kg |
4 kg |
12 kg |
14 kg |
16 kg |
20 kg |
|
最大工作半径 |
700 mm |
900 mm |
1300 mm |
1100 mm |
900 mm |
1300 mm |
|
重复精度 |
±0.05 mm |
±0.05 mm |
±0.1 mm |
±0.1 mm |
±0.1 mm |
±0.1 mm |
|
平均速度 |
1.1 m/s |
1.4 m/s |
1.3 m/s |
1.1 m/s |
1.1 m/s |
1.3 m/s |
|
关节速度 |
关节 1, 2, 3: 180°/s 关节 4, 5, 6: 225°/s |
关节 1, 2, 3: 180°/s 关节 4, 5, 6: 225°/s |
关节 1, 2: 120°/s 关节 3: 180°/s 关节 4, 5: 180°/s 关节 6: 180°/s |
关节 1, 2: 120°/s 关节 3: 180°/s 关节 4, 5: 150°/s 关节 6: 180°/s |
关节 1, 2: 120°/s 关节 3, 4, 5, 6: 180°/s |
关节 1, 2: 90°/s 关节 3: 120°/s 关节 4: 150°/s 关节 5: 180°/s 关节 6: 225°/s |
|
关节范围 |
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±155° 关节 6: ±270° |
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±155° 关节 6: ±270° |
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±166° 关节 6: ±270° |
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±163° 关节 6: ±270° |
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±155° 关节 6: ±270° |
关节 1: ±270° 关节 2, 4, 5: ±180° 关节 3: ±166° 关节 6: ±270° |
|
安装选项 |
墙壁 桌面 天花板 |
墙壁 桌面 天花板 |
墙壁 桌面 天花板 |
墙壁 桌面 天花板 |
墙壁 桌面 天花板 |
墙壁 桌面 天花板 |
|
IP 和洁净室等级 |
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3 |
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3 |
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3 |
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3 |
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3 |
IP54 (机械臂) IP32 (控制箱) IP40 (机器人操纵杆) ISO Class 3 |
|
编程环境 |
TMFlow (基于流程图) |
TMFlow (基于流程图) |
TMFlow (基于流程图) |
TMFlow (基于流程图) |
TMFlow (基于流程图) |
TMFlow (基于流程图) |
|
通信 |
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选) |
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选) |
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选) |
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选) |
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选) |
RS232 以太网 Modbus TCP/RTU PROFINET (可选) EtherNet/IP (可选) |







01
运动控制
伺服系统确保高效的生产线运动,减少停机时间和维护,实现更顺畅、更可靠的运营。

02
机器人
工业、移动和协作机器人可提高生产率,并能精准地适应各种应用。

03
控制
控制单元与您的生产线集成,在通过内置系统节省空间的同时最大限度地提高生产率。

04
视觉
相机和传感器可适应您的环境,实现顺畅、准确且高质量的自动化流程。

05
安全
安全传感器确保无缝的人机协作,降低风险并增强工作场所安全性。

软件
释放协作机器人的全部潜力
欧姆龙 TMflow 软件通过直观的拖放界面和用于精准搬运的内置视觉工具简化了编程。可定制的工作流和预配置的安全设置有助于减少停机时间,实现高效的人机协作并提高生产率。
了解更多
服务
全球服务与支持网络
欧姆龙机器人提供全球支持和培训,确保您的机器人以最佳状态运行,从而最大限度地延长正常运行时间并提高运营效率。
了解更多